
Estabilidade Aplicada no Projeto de Veículos Submarinos Autônomos
- 7 de mai. de 2020
- 3 min de leitura
Séculos atrás, as grandes navegações desempenharam um papel fundamental para o avanço de civilizações. Possuir uma frota marítima potente era um sinônimo de poder e media o quão hegemônica e influente uma nação se tornava. Não muito diferente daquela época, as ciências náuticas também permeiam nosso cotidiano. O crescente desenvolvimento tecnológico alcançado com o passar dos anos atingiu o setor naval e permitiu que hoje fosse possível que se desenvolvessem projetos de alta complexidade, tais quais robôs submarinos autônomos, os chamados AUV's. Porém, se tivéssemos que nos perguntar uma preocupação em comum entre nós e os inventores por trás de barcos movidos à vela seria o conceito de flutuabilidade.
No dia-a-dia, é essencial garantir que o nosso robô permaneça na água de um modo favorável para que desempenhe corretamente as tarefas que envolvem sua aplicação, seja em uma competição ou na indústria de petróleo. Tal preocupação envolve um pleno conhecimento em áreas que tangenciam desde à Mecânica e Hidrodinâmica, até o Princípio de Materiais. Tenda em vista isso, como podemos definir o conceito de Flutuabilidade?
Podemos defini-lo como o fenômeno resultante do deslocamento de massa d’água que seja maior do que o seu próprio peso. Se essa for menor do que seu próprio peso, o corpo afundará. Caso seja igual, ele flutuará. É válido ressaltar que isso está intrinsecamente ligado aos materiais que compõem o objeto em questão. Tanto para cascos de grandes embarcações ou para o frame do nosso AUV, é necessário que se haja um cuidado em determinar um tipo de material ideal para que as condições de flutuabilidade sejam atendidas, pensando em fatores como resistência e densidade.
Uma das aplicações mais importantes da flutuabilidade em embarcações em geral é na estabilidade, uma vez que para conseguir o equilíbrio, o comportamento do corpo no líquido é essencial. De acordo com o Princípio de Arquimedes (288 a.C - 212 a.C), uma das bases da Hidrostática, um corpo ao ficar imerso em um determinado fluido sofrerá por ele uma força vertical para cima, conhecida como empuxo. Tal força, ao ser combinada com o Peso atuante no Centro de Gravidade do corpo vai gerar uma dinâmica, podendo ser de caráter estável ou instável.
Para determinar o tipo de movimento que será realizado, é importante levar em consideração o Centro de Carena, que é o Centro de Gravidade do volume de água deslocado, nele está aplicada a força de empuxo. Uma de suas características é estar localizado na mesma linha de simetria do centro de gravidade do corpo, por isso, quando há um deslocamento lateral, é importante que o centro de carena esteja localizado acima do centro de gravidade, pois será gerado um torque no sentido oposto ao movimento, mantendo a tendência de equilíbrio.
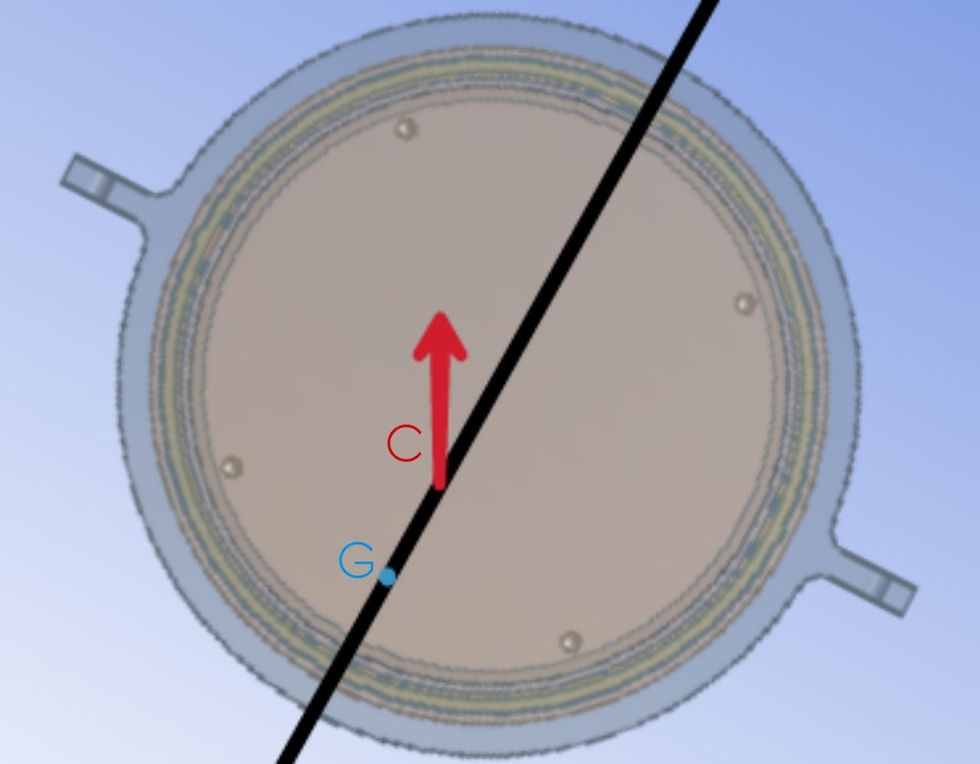
Representação da Vista Frontal do AUV inclinado na água
G = Centro de Gravidade; C = Centro de Carena
Os conceitos apresentados são de grande importância para o desenvolvimento da parte mecânica, tanto na competição quanto na integração com demais áreas do projeto. Levando em consideração a ideia de flutuabilidade e as regras da RoboSub®, é importante que nosso AUV(Autonomous Underwater Vehicle) tenha no mínimo 0,5% de flutuabilidade positiva ,ou seja, que 50 % do AUV esteja submerso.
Já a concepção e existência da estabilidade é um agente facilitador para os códigos responsáveis por controlar nosso submarino autônomo, de forma que será melhor explicada abaixo após a introdução de duas definições cruciais. Sendo a primeira o PID ,que é uma técnica de controle que consiste em minimizar o erro de um sinal pela ação proporcional, integrativa e derivativa. A segunda são os 3 graus de liberdade angulares (roll, pitch, yaw).

Por fim um AUV estável poupa poder computacional e tempo, levando em consideração que com o pitch o mais próximo possível de zero o controlador PID deste grau de liberdade pode ser desprezado. Importante salientar que para se mover ao longo do eixo X é necessário um valor nulo no pitch.
Escrito por Lara Figueiredo, Ramon Christian e Vinicius Feijó



コメント